By Husam Ibrahim, International Science Council (ISC)
The IIASA-ISC Enhancing Governance for Sustainability Report identifies the lessons learnt from the ongoing COVID-19 pandemic in relation to upgrading risk governance.
Credit: Adam Islaam – IIASA
As some governments and their administrations, individuals, and science systems begin to adapt to COVID-19, the struggle still continues in many countries. With that, the world is slowly leveraging the insights this pandemic has offered, standing at the cusp of a new world, which faces multiple stressors and is in need of more resilient governance.
Globally, national governments were put under the microscope. Some, such as Singapore and South Korea, succeeded with evidence-based, swift national leadership coupled with clear crisis communication. This proved useful for containing the spread of the COVID-19 virus and with it brought necessary recovery initiatives. In other countries, such as the United States, tackling the crisis has been characterized by governance challenges, including crisis plans with layers of shared responsibility being ignored in favor of “management by panic” approaches.
The pandemic has highlighted the flaws of neoliberal governance that prioritizes economic growth, deregulation and a separation between people and nature ahead of policies centered around human and ecosystem health and wellbeing.
To this effect, the IIASA-ISC Enhancing Governance for Sustainability Report goes beyond just considering the roles and responsibilities of governments, and adopts a broader definition of governance as, “the totality of actors, rules, conventions, processes, and mechanisms concerned with how relevant…information is collected, analyzed and communicated, and how management decisions are taken”.
In a world confronted with future risks such as spiraling climate change, ecosystem collapse and dwindling resources, global governance needs to be reformed.
The report states that the global community needs to engage in multi-directional and more integrated learning, problem identification and decision making. This should enable the shift towards more sustainable and equitable development in an ever-riskier world.
A disease with no respect for borders requires a collective response, said Volkan Bozkir, President of the United Nations General Assembly, adding that, “COVID-19 is a practice test that exhibits our weaknesses; we must build resilience now for whatever comes tomorrow.”
The pandemic highlighted widespread global fragmentation, which was initially observed through uncoordinated and sometimes competing actions. The report explains that organizations and agencies with similar objectives fought over resources, when instead they should have been bridging their divides and working cooperatively to eliminate competition. In the meantime, as the divide is bridged, special crisis provisions should be established for activation in case urgent action is needed again.
The report also recommends strengthening science–policy interactions to enable evidence-based decision-making, in which science systems collaborate with governments at all governance levels. Global and regional collaboration is especially important given the uneven scientific capabilities across countries and the need to tackle the pandemic everywhere to achieve health outcomes for all.
Working effectively at the interface of science and policy has been a challenge for many countries, which warrants further investigation. However, scientists have tried to step up to the challenges in some unprecedented ways.
For example, online repositories started publishing COVID-19 studies as pre-prints so that their findings could be used by all scientists quickly. As a result, researchers have identified and shared hundreds of viral genome sequences, and several hundreds of clinical trials have been launched, bringing together hospitals and laboratories around the globe.
Mukhisa Kituyi, the Secretary-General of the United Nations Conference on Trade and Development, referred to international scientific collaboration in reference to COVID-19, as the “engine of global science” and said, “It is thus crucial that scientific responses are based on international collaboration that brings together the best minds and available data from different countries for the benefit of all”
Therefore, to reform global governance, evidence-sharing arrangements need to be centered on a global level with reliable evidence, which must be made available swiftly in times of crises. In order for this to happen, the report recommends the creation of specialized advisory bodies that offer consultations on a regular and on-demand basis. The report also suggests involving diverse stakeholder perspectives in these consultations.
Another key point to enhancing sustainable governance is risk reduction management, which should be a fundamental component of decision-making and a part of the investment in sustainable development. The report states that a global socio-ecological resilience and risk dialogue should be launched, engaging policymakers, civil society, the private sector, and the scientific community in mapping risks and their drivers at different scales and discussing their implications for risk governance, prevention and preparedness. Such an engagement process would increase the understanding and communication of the compound, systemic nature of risks driven by infectious diseases, climate change, and other socio-ecological stressors.
“A more holistic approach to risk that better takes into account the many intricate links between nature and people is sorely needed if we are to achieve the Sustainable Development Goals.”
– Anne-Sophie Stevance, ISC
Unifying fragmented global organizations and governance, forming scientific evidence-based policies with the help of science systems, and enhancing levers pertaining to risk management are only some of the recommendations in the report. For more information on upgrading risk governance read the IIASA-ISC Enhancing Governance for Sustainability Report.
You can also watch the discussion on Learning from COVID-19 and upgrading sustainable governance as part of the launch event for the Bouncing Forward Sustainably: Pathways to a post-COVID World initiative, which explores the key themes of Sustainable Energy, Governance for Sustainability, Strengthening Science Systems, and Resilient Food Systems.
This blog post was first published on the website of the International Science Council. Read the original article here.
Note: This article gives the views of the author, and not the position of the Nexus blog, nor of the International Institute for Applied Systems Analysis.
IIASA researchers Michael Obersteiner, David Leclère, and Piero Visconti discuss the findings of their latest paper, which proposes pathways to reverse the current trend of biodiversity loss and shows that the next 30 years will be pivotal for the Earth’s wildlife.
Species are going extinct at an unprecedented rate. Wildlife populations have fallen by more than two-thirds over the last 50 years, according to a new report from the World Wildlife Fund. The sharpest declines have occurred throughout the world’s rivers and lakes, where freshwater wildlife has plummeted by 84% since 1970 – about 4% per year.
But why should we care? Because the health of nature is intimately linked to the health of humans. The emergence of new infectious diseases like COVID-19 tend to be related to the destruction of forests and wilderness. Healthy ecosystems are the foundation of today’s global economies and societies, and the ones we aspire to build. As more and more species are drawn towards extinction, the very life support systems on which civilization depends are eroded.
Even for hard-nosed observers like the World Economic Forum, biodiversity loss is a disturbing threat with few parallels. Of the nine greatest threats to the world ranked by the organization, six relate to the ongoing destruction of nature.
Economic systems and lifestyles which take the world’s generous stocks of natural resources for granted will need to be abandoned, but resisting the catastrophic declines of wildlife that have occurred over the last few decades might seem hopeless. For the first time, we’ve completed a science-based assessment to figure out how to slow and even reverse these trends.
Our new paper in Nature featured the work of 60 coauthors and built on efforts steered by the Intergovernmental Panel on Biodiversity and Ecosystem Services. We considered ambitious targets for rescuing global biodiversity trends and produced pathways for the international community to follow that could allow us to meet these goals.
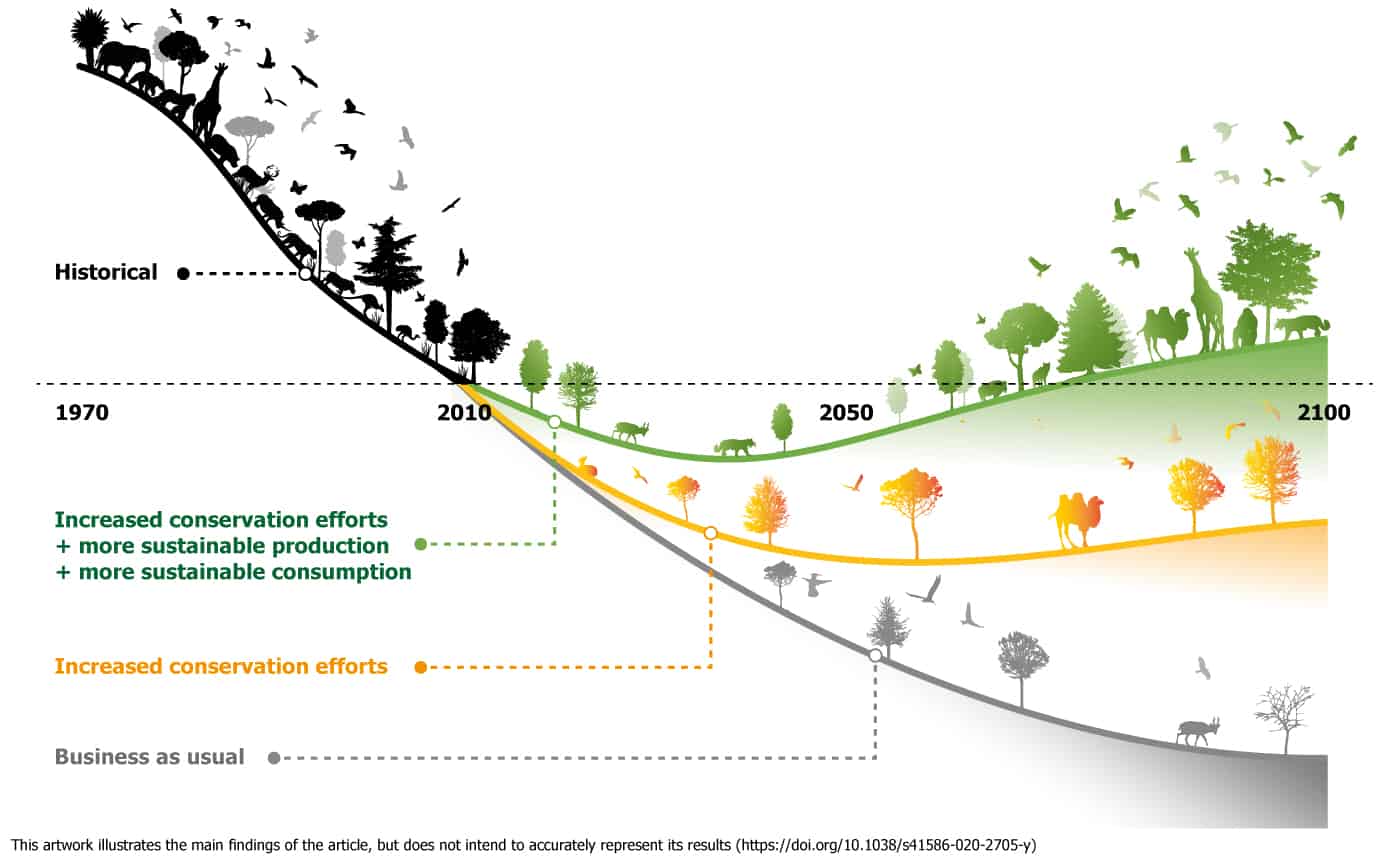
Bending the curve
The targets of the UN Convention on Biological Diversity call for global trends of terrestrial wildlife to stop declining and start recovering by 2050 or earlier. Changes in how land is used – from pristine forest to cropland or pasture – rank among the greatest threats to biodiversity on land worldwide. So what are the necessary conditions for biodiversity to recover during the 21st century while still supporting growing and affluent human societies?
Two key areas of action stand out from the rest. First, there must be renewed ambition from the world’s governments to establish large-scale conservation areas, placed in the most valuable hotspots for biodiversity worldwide, such as small islands with species found nowhere else. These reserves, in which wildlife will live and roam freely, will need to cover at least 40% of the world’s land surface to help bend the curve from decline to recovery for species and entire ecosystems.
The location of these areas, and how well they are managed, is often more important than how big they are. Habitat restoration and conservation efforts need to be targeted where they are needed most – for species and habitats on the verge of extinction.
Second, we must transform our food systems to produce more on less land. If every farmer on Earth used the best available farming practices, only half of the total area of cropland would be needed to feed the world. There are lots of other inefficiencies that could be ironed out too, by reducing the amount of waste produced during transport and food processing, for example. Society at large can help in this effort by shifting towards healthier and more sustainable diets, and reducing food waste.
This should happen alongside efforts to restore degraded land, such as farmland that’s becoming unproductive as a result of soil erosion, and land that’s no longer needed as agriculture becomes more efficient and diets shift. This could return 8% of the world’s land to nature by 2050. It will be necessary to plan how the remaining land is used, to balance food production and other uses with the conservation of wild spaces.
Without a similar level of ambition for reducing greenhouse gas emissions, climate change will ensure the world’s wildlife fares badly this century. Only a comprehensive set of policy measures that transform our relationship with the land and rapidly scale down pollution can build the necessary momentum. Our report concludes that transformative changes in our food systems and how we plan and use land will have the biggest benefits for biodiversity.
But the benefits wouldn’t end there. While giving back to nature, these measures would simultaneously slow climate change, reduce pressure on water, limit nitrogen pollution in the world’s waterways and boost human health. When the world works together to halt and eventually reverse biodiversity loss, it’s not only wildlife that will thrive.
This article originally appeared on The Conversation. Read the original article here.
Note: This article gives the views of the authors, and not the position of the Nexus blog, nor of the International Institute for Applied Systems Analysis.
By Rachel Potter, Communications Officer in the IIASA Communications and External Relations Department.
Several members of the IIASA Strategic Taskforce share their views on the bold new IIASA strategic agenda, how it came to be, and what it promises for the future.
What will the world look like in 2030 and beyond? We are living in extraordinary times and our rapidly transforming planet faces multiple global sustainability challenges, threats, and opportunities. How will research institutes like IIASA continue to make meaningful contributions to address these complex issues?
This is precisely what IIASA has been exploring over the past 18 months while formulating its strategic direction for the next 10 years. Through institute-wide consultations, a strategic taskforce was entrusted with coordinating the process that led to “Reducing footprints, enhancing resilience” – the institute’s ambitious new strategy for 2021-2030 that positions IIASA as the primary destination for integrated systems solutions and policy insights.
A bottom-up inclusive approach
The strategy consultation process was very different to those previously undertaken at IIASA. Acting Transitions to New Technologies Program Director and Energy Program researcher, Shonali Pachauri describes the rationale behind the process:
“While in the past strategic planning had largely been driven by the directorate and program directors, this time, mid-career scientists were to drive the process forward. It was not meant to be one researcher from each program on the taskforce, but it ended up being something like that, so we had a broad representation of disciplines from across the institute. The taskforce was responsible for developing the scientific content of the plan and we did this in an inclusive manner with input from staff through workshops, an online platform, and both informal and formal meetings.”
Reflecting our changing world
The UN Sustainable Development Goals (SDGs) established in 2015, are clearly reflected in the new strategy. Linda See, a researcher in the Ecosystems Services and Management Program, explains:
“We have always worked on sustainable development and transformations but this is now more of a focus compared to the previous strategy. The emphasis is on using our expertise as systems scientists to explore the interrelationships between different SDGs and how there can be synergies and trade-offs in different scenarios to achieve them.”
“Another key shift is that the new strategic plan takes a human-centered approach, placing more emphasis on how people are a core component of pathways towards sustainability and resilient societies,” adds World Population Program Deputy Program Director, Raya Muttarak.
Fellow taskforce member and Acting Water Program Director, Yoshihide Wada, agrees:
“This focus on social science, governance, and human behavior came out of our consultations with staff. IIASA researchers really want to go in this direction. People increasingly understand that with the climate and environmental goals in particular, it can’t only be technology and bioeconomy, it has to be about lifestyles as well, which means we need to strengthen our ability to analyze behavior and identify which levers to pull to encourage lifestyle changes.”
“There is also a stronger focus on biodiversity. The importance of this was borne out of the current COVID-19 crisis. Looking at the origin of the virus and how the pandemic has been aided by the loss of biodiversity – it’s evident that this is crucial,” adds Manager of Library and Knowledge Resources, Michaela Rossini.
Building on strong foundations for continued innovation
Taskforce members agree that the new strategy consolidates the unique strengths of IIASA while providing the space and flexibility for innovation.
“IIASA is unique not only because of our excellence in the fields of energy, environment, climate change, and ecosystems services but also because we have strong, empirically-based analyses and studies from social sciences, which can quantify and forecast relevant demographic, social, and economic dimensions in systems analysis,” says Muttarak.
“I think the new strategy pushes the interdisciplinarity at IIASA even further. The new program structure is very integrated. This is vital to facing today’s sustainability challenges. There are big aspirations in the strategy and it’s our responsibility to translate this into practice. As scientists, we have to be open to change and include elements that we may never have thought of. It makes things very interesting. It makes innovation happen,” Wada adds.
Pachauri explains that IIASA was created as a science-to-policy interface in 1972 and its purpose has always been to bridge divides: both between disciplines and across transnational boundaries. The new strategy really builds on this history. While the institute innovates a lot in terms of models and methods, this always happens through an applied lens of doing something that will ultimately feed into policy.
One of the institute’s key strengths is its relationships with its National Member Organizations and strong global network. These relationships are what make it possible to tackle the real-world problems society faces today. The flexibility to work across networks, countries, and different levels of government is strongly emphasized in the strategy.
A bit like family
According to Muttarak, the process of drawing up the new IIASA strategy has been a great opportunity to work with people from different programs and units. Not only has this allowed everyone involved to get to know their colleagues better, but it has also enhanced team members’ understanding of systems analysis and the importance of IIASA.
“It was challenging and rewarding, a bit like family!” comments Pachauri. “There was a lovely dynamism in the team and although we had a Chair, everyone had a chance to lead at various times in the process.”
“As the only non-scientist I found working on the taskforce invaluable – understanding more about IIASA research and getting to know scientists from across the institute has really enhanced my awareness of what they do and what their needs are going forward,” Rossini concludes.
The full IIASA Strategic Taskforce is comprised of: Luis Gomez Echeverri, Matthias Jonas, Mauricio A. Lopes, Junko Mochizuki, Raya Muttarak, Shonali Pachauri, Michaela Rossini, Linda See, Thomas Schinko, Yoshihide Wada, and Fabian Wagner.
Note: This article gives the views of the author, and not the position of the Nexus blog, nor of the International Institute for Applied Systems Analysis.
Howard Raiffa, the founding director of IIASA, was about to leave Schloss Laxenburg in November 1975 to return to the USA. In his farewell address, he reflected on the institute’s first three years as an East-West research institute during the Cold War and concluded:
“My most exhilarating moments at IIASA, the times when I feel most rewarded by all our efforts, occur whenever I am present at a scientific meeting and scientists from different disciplines and cultural backgrounds argue with each other, on substantive issues, without being conscious of their roles as mathematicians or economists or management scientists or of their national identities. I will never forget those times, when [Wolf] Haefele of F.R.G. [West Germany] and [Hans] Knop of G.D.R. [East Germany] would argue heatedly on a scientific point – sometimes on the same side and at other times on opposite sides.”
As Howard Raiffa pointed out, IIASA, founded in 1972 in the wake of Cold War détente, provided an exceptional platform for scientific dialogue and exchange across borders – in particular for East and West Germans.
Intrigued by IIASA’s history
Looking back from the present day, knowing how difficult interdisciplinary collaboration between scientists from different nations and cultures can be, one question that comes up right away is: what was it like working at IIASA in the 1970s and 1980s in the context of the Cold War?
I asked myself this question when I first came across IIASA in the fall of 2017, and the spring of 2018, when I started working on a dissertation project on the institute’s East and West German history. It is done as part of a research group that examined “Cooperation and Competition in the Sciences” in case studies from a historical perspective. In my dissertation, I analyzed the relations between scientific and political actors from East and West Germany in the context of IIASA, with a focus on mechanisms of collaboration and competition at the local site as well as on wider effects in the entangled Cold War German history.
Historical research: books, dust, and coffee
Historians write books, but in order to do that we have to read hundreds of other books, look for traces in (sometimes more, sometimes less) dusty archives, and drink a lot of coffee with interesting people.
Initially my research led me to several German state and scientific archives. In the Federal Archives, for example, I found evidence of close interconnections between German science and politics during the Cold War regarding IIASA – not only in the case of the GDR, but also the FRG. Besides the intention to build a bridge between East and West, IIASA was also an arena for Cold War rivalry in the eyes of both German states. My favorite archival find were the documents of the Max Plank Society, which was the former West German National Member Organization of IIASA.
In Germany, I also had the opportunity to talk to former West German members of the IIASA energy group in the 1970s and 1980s. Among them was Rudolf Avenhaus, who started working in the energy project under the leadership of Wolf Häfele in the summer of 1973. Over several cups of coffee, he told me about his life, what it was like to work at IIASA in those years, and about his collaboration with Willi Hätscher, one of the few East Germans in the group at that time.
A visit to IIASA and an inquiry
I finally had the chance to visit IIASA in the summer of 2019. With the help of several IIASA colleagues, I explored the IIASA archive for insights into the institute’s East-West German history. I also had the opportunity to discover more by talking to former and current IIASA employees. Two conversations I want to mention in particular, were with long-term staff members Martha Wohlwendt and Ruth Steiner, who provided an alternative view of IIASA to that of the scientists. I enjoyed my visit to the beautiful Schloss Laxenburg immensely and hope to return.
After collecting all these sources, from archival records to personal interviews, I can now begin writing an account on how cooperation and competition formed the relations between East and West Germans in the context of IIASA and thus, make IIASA’s history even better known.
After sharing this insight into my research, I would like to end with an inquiry. If you read this and think, “I could add something to this story!”, I would be happy to hear from you. Whether you are a former German IIASA staff member or have another connection to all of this, maybe we can add another piece to the puzzle together.
Contact:
Liza Soutschek
Institut für Zeitgeschichte München – Berlin
Leonrodstr. 46b, 80636 München, Germany soutschek@ifz-muenchen.de
Note: This article gives the views of the author, and not the position of the Nexus blog, nor of the International Institute for Applied Systems Analysis.
By Brian Fath, Young Scientists Summer Program (YSSP) scientific coordinator, researcher in the Advanced Systems Analysis Program, and professor in the Department of Biological Sciences at Towson University (Maryland, USA) and Soeren Nors Nielsen, Associate professor in the Section for Sustainable Biotechnology, Aalborg University, Denmark
IIASA Young Scientists Summer Program (YSSP) scientific coordinator, Brian Fath and colleagues take an extended look at the application of the ecosystem principles to environmental management in their book, A New Ecology, of which the second edition was just released.
IIASA is known for some of the earliest studies of ecosystem dynamics and resilience, such as work done at the institute under the leadership of Buzz Holling. The authors of the book, A New Ecology, of which the second edition was just released, are all systems ecologists, and we chose to use IIASA as the location for one of the brainstorming meetings to advance the ideas outlined in the book. At this meeting, we crystallized the idea that ecosystem ontology and phenomenology can be summarized in nine key principles. We continue to work with researchers at the institute to look for novel applications of the approach to socioeconomic systems – such as under the current EU project, RECREATE – in which the Advanced Systems Analysis Program is participating. The project uses ecological principles to study urban metabolism – a multi-disciplinary and integrated platform that examines material and energy flows in cities as complex systems.
Our book argues the need for a new ecology grounded in the first principles of good science and is also applicable for environmental management. Advances such as the United Nations Rio Declaration on Sustainable Development in 1992 and the more recent adoption of the Sustainable Development Goals (2015) have put on notice the need to understand and protect the health and integrity of the Earth’s ecosystems to ensure our future existence. Drawing on decades of work from systems ecology that includes inspiration from a variety of adjacent research areas such as thermodynamics, self-organization, complexity, networks, and dynamics, we present nine core principles for ecosystem function and development.
The book takes an extended look at the application of the ecosystem principles to environmental management. This begins with a review of sustainability concepts and the confusion and inconsistencies of this is presented with the new insight that systems ecology can bring to the discussion. Some holistic indicators, which may be used in analyzing the sustainability states of environmental systems, are presented. We also recognize that ecosystems and society are physically open systems that are in a thermodynamic sense exchanging energy and matter to maintain levels of organization that would otherwise be unattainable, such as promoting growth, adaptation, patterns, structures, and renewal.
Another fundamental part of the evolution of the just mentioned systems are that they are capable of exhibiting variation. This property is maintained by the fact that the systems are also behaviorally open, in brief, capable of taking on an immense number of combinatorial possibilities. Such an openness would immediately lead to a totally indeterminate behavior of systems, which seemingly is not the case. This therefore draws our attention towards a better understanding of the constraints of the system.
One way of exploring the interconnectivity in ecosystems is taking place mainly through the lens of ecological network analysis. A primer for network environment analysis is provided to familiarize the reader with notation including worked examples. Inherent in energy flow networks, such as ecosystem food webs, the real transactional flows give rise to many hidden properties such as the rise in indirect pathways and indirect influence, an overall homogenization of flow, and a rise in mutualistic relations, while hierarchies represent conditions of both top-down and bottom-up tendencies. In ecosystems, there are many levels of hierarchies that emerge out of these cross-time and space scale interactions. Managing ecosystems requires knowledge at several of these multiple scales, from lower level population-community to upper level landscape/region.
Viewing the tenets of ecological succession through a lens of systems ecology lends our attention the agency that drives the directionality stemming from the interplay and interactions of the autocatalytic loops – that is, closed circular paths where each element in the loop depends on the previous one for its production – and their continuous development for increased efficiency and attraction of matter and energy into the loops. Ecosystems are found to show a healthy balance between efficiency and redundancy, which provides enough organization for effectiveness and enough buffer to deal with contingencies and inevitable perturbations.
Yet, the world around us is largely out of equilibrium – the atmosphere, the soils, the ocean carbonates, and clearly, the biosphere – selectively combine and confine certain elements at the expense of others. These stable/homoeostatic conditions are mediated by the actions of ecological systems. Ecosystems change over time displaying a particular and identifiable pattern and direction. Another “unpleasant” feature of the capability for change is to further evolve through collapses. Such collapse events open up creative spaces for colonization and the emergence of new species and new systems. This pattern includes growth and development stages followed by the collapse and subsequent reorganization and launching to a new cycle.
A good theory should be applicable to the concepts in the field it is trying to influence. While the mainstream ecologists are not regularly applying systems ecology concepts, the purpose of our book is to show the usefulness of the above ecosystem principles in explaining standard ecological concepts and tenets. Case studies from the general ecology literature are given relating to evolution, island bio-geography, biodiversity, keystone species, optimal foraging, and niche theory to name a few.
No theory is ever complete, so we invite readers to respond and comment on the ideas in the book and offer feedback to help improve the ideas, and in particular the application of these principles to environmental management. We see a dual goal to understand and steward ecological resources, both for their sake and our own, with the purpose of an ultimate sustainability.
Note: This article gives the views of the author, and not the position of the Nexus blog, nor of the International Institute for Applied Systems Analysis.




You must be logged in to post a comment.